Thema:
Der Tribot (Omnibot) und dessen Konzept

![]()
Der Name Tribot setzt sich aus dem lateinischen Begriff
tres = drei und aus der englischen Kurzform bot, für Roboter
zusammen. Damit wird das Alleinstellungsmerkmal unseres Roboters
deutlich, da wir drei Schaufeln nutzen nutzen, statt der
üblichen Variante mit nur einer Schale.
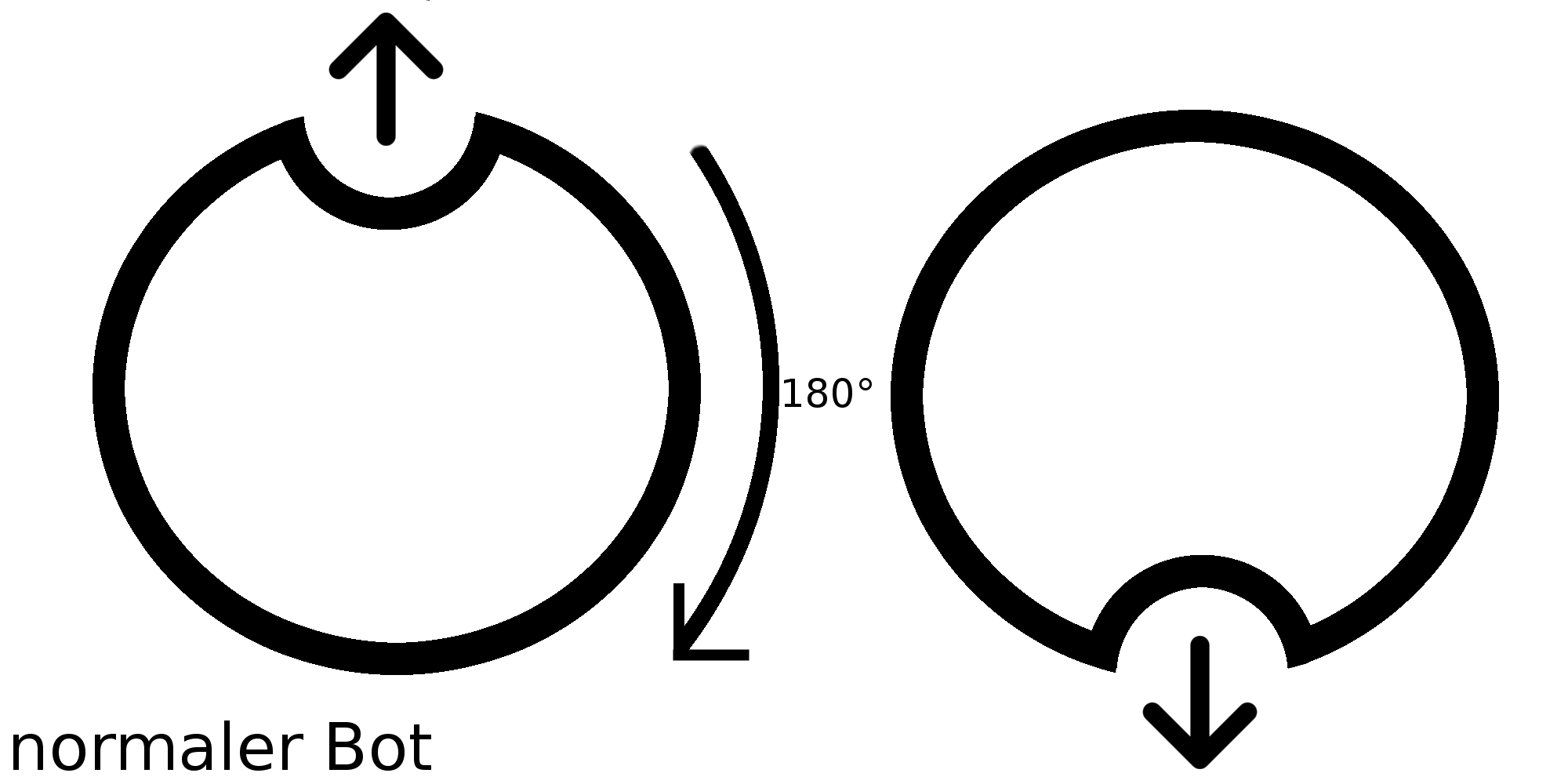
Dank dieses Konzepts muss sich unser Roboter maximal um 60° drehen
um sich nach dem Ball auf dem Spielfeld auszurichten. Im Gegensatz
dazu muss sich ein „normaler“ Bot mit nur einer Schaufel bis zu 180°
zum Ball drehen.
Dieser Unterschied wird auch in der Illustration
(rechts) deutlich.
Die Idee, welche diesem Konzept zu Grunde liegt, ist recht simpel:
Durch den kleineren Maximalwinkel kann sich der Roboter schneller ausrichten,
und somit auch schneller zum Ball fahren.
Infrarotsensoren
 Neben seinen zusätzlichen Orientierungsrichtungen besitzt der Tribot
noch insgesamt zwölf Infrarotsensoren. Jedes Drittel des Tribot's hat dabei vier IR-Sensoren:
Neben seinen zusätzlichen Orientierungsrichtungen besitzt der Tribot
noch insgesamt zwölf Infrarotsensoren. Jedes Drittel des Tribot's hat dabei vier IR-Sensoren:
In jeder Schaufel jeweils zwei, mit einem engen Schlitz, um einen
kleineren Winkel zu erfassen, von denen der eine ca. 15° nach unten,
und der andere parallel zum Boden gerichtet ist. Rechts und links von
jeder Schaufel befindet sich jeweils noch ein Sensor mit einem breiteren
Schlitz, der parallel zum Boden gerichtet ist.
Durch diese Anordnung soll einerseits garantiert werden, dass die IR-Senoren
die Position des Balles (in Abhängigkeit von der Position des Tribot's)
auf dem Spielfeld erfassen und andererseits kann durch die Infrarotsensoren
in der Schaufel geprüft bzw. erkannt werden, ob sich ein Ball innerhalb einer Schaufel befindet.
Ultraschallsensoren
 Neben den Infrarotsensoren sollte unser Tribot des Weiteren drei Ultraschallsensoren
zur Distanzmessung verwenden. Für diese war auch das Entwickeln eines Turms (prismenförmig)
bzw. einer Pyramide angedacht, um die Ultraschallsensoren am Bot anbringen zu können, da die
Infrarotsensoren bereits den Platz auf dem äußeren Ring der Tribotoberfläche einnahmen.
Die Form einer Pyramide rührt unter anderem daher, dass einerseits ein Ultraschallsensor pro
Schaufel verwendet werden und auch in der jeweiligen Richtung angebracht werden sollte.
Außerdem mussten die Sensoren in das Zentrum des Roboters geneigt werden, damit der von ihnen
emittierte Ultraschall nicht die falsche Distanz misst:
Neben den Infrarotsensoren sollte unser Tribot des Weiteren drei Ultraschallsensoren
zur Distanzmessung verwenden. Für diese war auch das Entwickeln eines Turms (prismenförmig)
bzw. einer Pyramide angedacht, um die Ultraschallsensoren am Bot anbringen zu können, da die
Infrarotsensoren bereits den Platz auf dem äußeren Ring der Tribotoberfläche einnahmen.
Die Form einer Pyramide rührt unter anderem daher, dass einerseits ein Ultraschallsensor pro
Schaufel verwendet werden und auch in der jeweiligen Richtung angebracht werden sollte.
Außerdem mussten die Sensoren in das Zentrum des Roboters geneigt werden, damit der von ihnen
emittierte Ultraschall nicht die falsche Distanz misst:
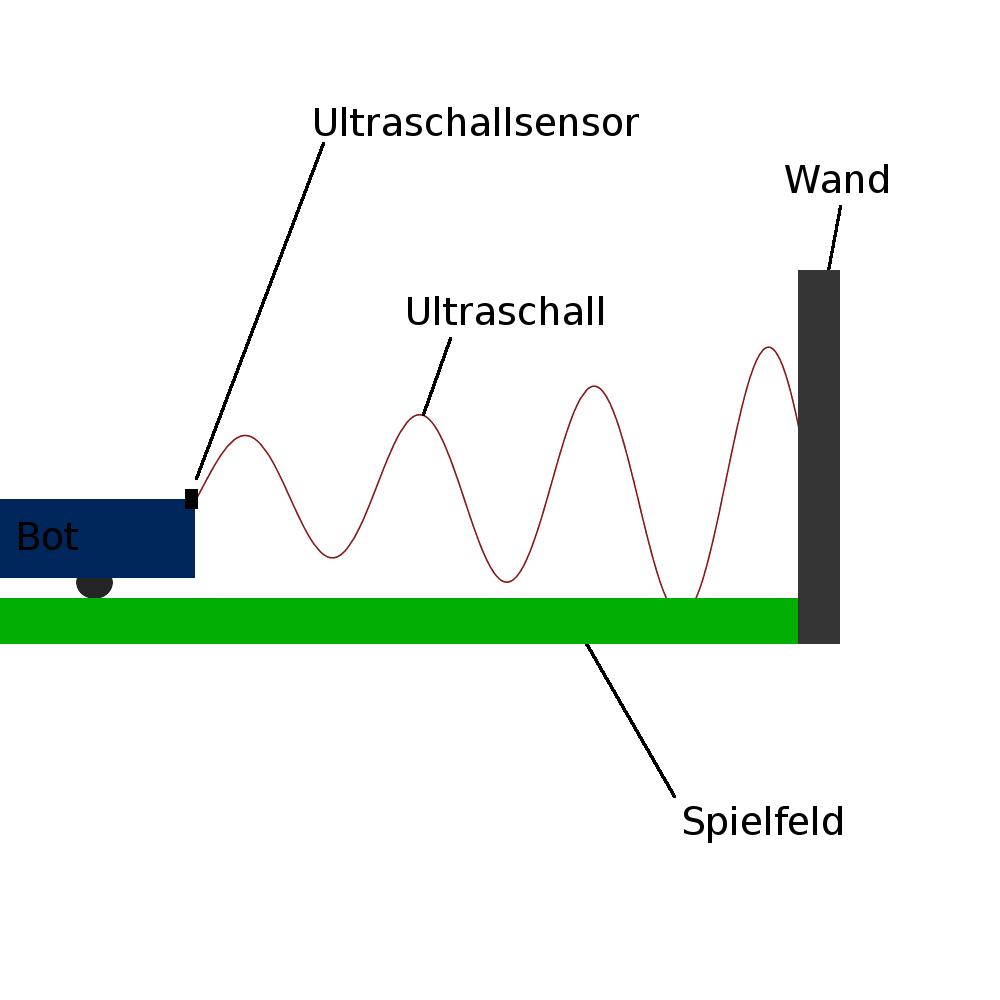
Wie an der Darstellung (rechts) zu erkennen ist, breitet sich Ultraschall sinusförmig aus
während die Amplituden sich auch in y-Richtung (in der Höhe) ausbreiten. Deswegen könnte es bei
einer Ausrichtung parallel zum Spielfeld dazu führen, dass der Ultraschall bereits am Boden reflektiert
wird und die Sensoren das Echo dieser Reflektion vermessen und dann die Distanz zu einer Stelle auf
dem Spielfeld berechnen, anstatt des Abstands zur Spielfeldbegrenzung.
(Erkennbar an der Abbildung: Welle trifft auf Spielfeld auf)
Zustätzlich zu den Infrarot- und Ultraschallsensoren wurde der Tribot noch mit drei Polulu
Motortreibern sowie Motoren plus Rädern zur Fortbewegung ausgestattet.
Ballkontrolle durch Silikon
Während die Hardware des Tribot's zum Großteil feststand wurden die Schaufeln per 3D-Druck
angefertigt, was den Vorteil eines geringeren Gewichts mit sich brachte, wodurch eine höchstmögliche
Beschleunigung des Roboters erzielt werden sollte.
Allerdings fiel nach ein paar Tests bereits auf, dass der Ball, wenn er in die Schaufel rollt
(oder wenn sich der Roboter schnell auf ihn zubewegt), an der Schaufel abprallte und der Bot
wieder die Kontrolle über den Ball verlor. Dieses Wegspringen des Balls verhinderten wir dadurch,
dass wir Aussparungen in den Schaufeln kreierten und diese mit Silikon auffüllten. Dies reduzierte
die Wegspring-Gefahr und ermöglicht (deswegen) auch eine größere Kontrolle des Balles bei der Fahrt.