Beide Roboter fuhren um den Ball herum mit Ausrichtung zum Gegentor,
um Eigentore zu verhindern. Jegliche Richtungen wurden in Grad angegeben.
Genau mittig vor dem Bot betrug die Ballrichtung 0°, genau mittig hinter
dem Bot betrug die Ballrichutng -180°/180°. Die Winkel von 0° bis 180° lagen
auf der rechten Hälfte des Bots, die Winkel von 0° bis -180° lagen auf der
linken Hälfte des Bots von Oben gesehen mit dem vorderen Ende (0°) nach oben
gerichtet.
Im Programm wurde die Entscheidung, wie gefahren werden soll nach Abschnitten
bestimmt. So fuhr der Bot z.B. wenn der Ball sich zwischen 30° und 60° befand
Richtung 90°. Durch den Kompass wurde gewährleistet, dass der Bot immer zum
gegnerischen Tor gewandt war und der Ball immer mit der Schale getroffen wurde.
Befand sich der Ball auf 0° fuhr der Bot geradeaus, falls er das Tor nicht sah.
Befand der Ball sich auf 0° und das Tor war sichtbar, korrigierte der Bot seine
Fahrtrichtung in Richtung Tor, was selten eine zu große Abweichung von 0° zufolgehatte,
als dass der Bot den Ball nicht mehr treffe, fuhr bis zum Strafraum und schoss bei
erreichen des Strafraums auf das Tor, falls er es dann noch sah. Hier der
entsprechende Code dafür:
| Zeile |
CODE (Das Programmierte) |
|
Kommentare |
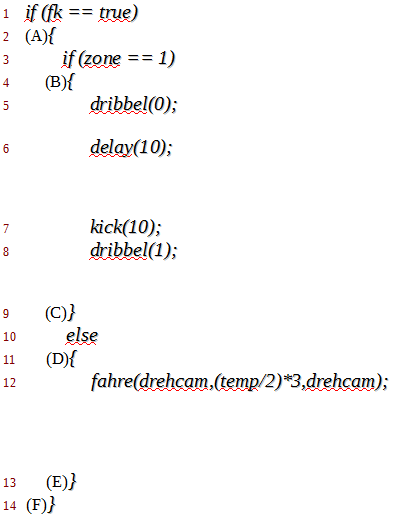 |
Abfrage, ob genug vom Tor zu sehen ist [1].
Wenn [1] zutrifft passiert alles von (A) bis (F).
Abfrage, ob das Tor nah genug für einen Schuss ist[2].
Wenn [2] zutrifft passiert alles von (B) bis (C).
Der Dribbler wird angehalten, damit der Ball nicht
durch einen zu starken Drall abgebremst wird.
Es wird für 10 Millisekunden keine Handlung vollzogen,
damit der Ball den bestehenden Drall verlieren kann,
da sonst der Schuss womöglich ungewollt abgelenkt wird.
Es wird geschossen.
Dribbler wird wieder eingeschaltet, damit der Standard
wiederhergestellt ist und der Ball behalten wird,
auch wenn ein Gegner dem Schuss im Weg war.
Siehe Zeile 4.
Siehe Zeile 3.
Wenn [2] nicht zutrifft passiert alles von (D) bis (E).
Die 1. Angabe in der Klammer vor dem Komma bestimmt,
dass der Bot in Richtung des Tores fährt.
Die 2. Angabe zwischen den Kommata ist eine von uns
festgelegte Geschwindigkeit. Die 3. Angabe besagt, dass
der Bot sich in Richtung des Tores dreht.
Siehe Zeile 11.
Siehe Zeile 2.
|
Da der Bot wenn er den Ball nicht mehr sah nach hinten fuhr,
befand sich im Falle des Ballbesitzes meist ein Bot vor unserem
Tor und fungierte als (aggressiver) Verteidiger, weil der andere
Bot den Ball verdeckte. Wenn der Bot auf eine Weiße Linie traf,
fuhr er in entgegengesetzter Richtung des Winkels der Linie vom Aus weg.
Beispielsituationen