Aufbau
Grundkonstruktion
Beim Designen der Roboter haben wir
uns vorerst an den vom Robocup Soccer vorgegebenen Richtlinien orientiert und
zudem unseren Roboter so praktisch und effizient wie möglich gestaltet. Bei den vorgegeben
Richtlinien handelt es sich zum einen um die Maße von: 22,0cm Durchmesser,
22,0cm Höhe und einem Gewicht von 2400g. Wir mussten uns außerdem an das Regelwerk
in Bezug auf das Spielfeld halten. Somit haben wir eine Konstruktion
(Schutzring) angefertigt, welche verhindert,
dass die Roboter in das eigene Tor fahren. Zuletzt haben wir uns an Erfahrungen
aus dem Vorjahr orientiert und aus diesem Grund einen runden Roboter gestalten,
weil die Problematik darin bestand, dass die Roboter sowohl an Gegnern als auch
an den Toren hängen geblieben ist.
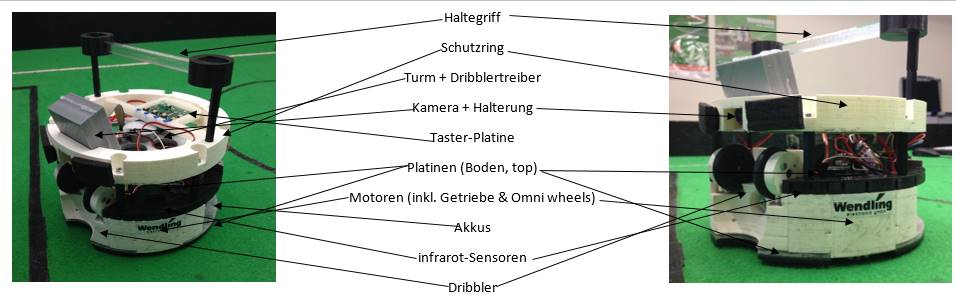 Abb.1+2: Aufbau Roboter
Abb.1+2: Aufbau Roboter
Aufbau oberer Teil
Der obere Teil des Roboters besteht
im Wesentlichen aus einem äußeren Schutzring, einer Kamera mit zugehöriger Halterung,
einem Turm, welcher sowohl eine Taster-Platine mit Kompass trägt, als auch die Dribbler-Treiber
umschließt. Der Schutzring dient als Fundament für unseren abschraubbaren Haltegriff
(Abb.1+2).
Aufbau unterer Teil
Das Herzstück unserer Roboter besteht
aus Boden-Platine, top-Platine, Strom-
und Kicker-Platine, drei Maxxon Motoren mit Getriebe und Omni wheels, zwei Akkus.
Beide Platinen sind mit speziellen Sensoren bestückt. Bei der top-Platine
handelt es sich um infrarot-Sensoren, bei der Boden-Platine um Licht-Sensoren.
Die Platinen und Sensoren werden von Plexiglas- beziehungsweise Memoryschaumscheiben
geschützt. Des Weiteren dienen diese als Platzhalter. Die 28 infrarot-Sensoren
welche zur Erkennung des Balles nötig sind und daher auf dem äußeren Radius in Ringform
angeordnet sind, werden zudem von einem von uns designten 3D-Druck geschützt
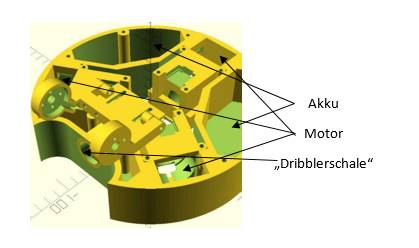
(Abb.1+2). Die Vorteile des 3D-Drucks machten wir uns außerdem bei der Konstruktion
eines praktischen Akku- und Motorenwechlungssytem zu Nutze (Abb.3, Abb. 4).
Hierfür haben wir ein schiebe
Vorrichtung erstellt, welche nebenbei folgende Komponenten zusammenhält:
·
Zwei
Akkuaufbewahrunsschalen
·
Drei
Motorenmodule mit Getriebe und Omni wheels; Diese sind eingefasst in eine
3D-Druckhülle und mit dem Ziel in alle Richtungen zu fahren dreieckig ausgerichtet.
·
Eine
„Dribbler“- beziehungsweise „Kickerschale“
Für eine sichere Fixierung aller
Komponenten sorgen hierbei 12 massive Schrauben (Abb.3).
![]()
![]() Abb.3
Abb.3  Abb.4 : Akkuwechsel
Abb.4 : Akkuwechsel
„Dribbler“ und „Schieber“
Aus taktischen Gründen haben wir uns
bei der Gestaltung der Roboter für einen „Dribbler“ mit Kicker und einen „Schieber“
entschieden. Der „Dribbler“ wurde dabei für die offensive Spielweise und der „Schieber“
für die defensive eingesetzt
 „Dribbler“
„Dribbler“
Die „Dribbelschale“ (ebenfalls 3d
druck) besitzt eine Aussparung welche den Robotern ermöglicht den Ball
bestmöglich mit dem oben liegenden Dribbler zu kontrollieren. Um einen Ballbesitz
erkennen zu können ist in jener Schale eine Lichtschranke integriert. Der Kicker
befindet sich mittig der Aussparung auf Höhe der Ballmitte.
 „Schieber“
„Schieber“
Für den „Schieber“ haben wir
ebenfalls eine Schale gedruckt, welche uns ermöglicht den Ball mit einer
besonders großen möglichen Auflagefläche zu schieben/schießen.
Projektarbeit by Julia Hillebrand (Team
weiß)