Bodenplatine
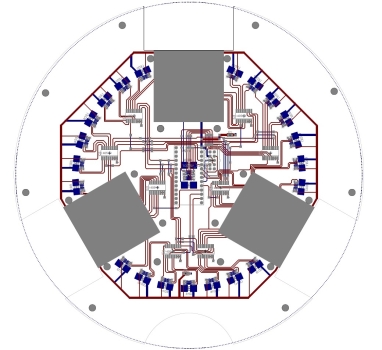
Die Platine auf dem Boden ist zuständig für die Erkennung der Linien auf dem Soccer-B-Feld Dies macht er über insgesamt 32 sogennante "LIGHT-TO-VOLTAGE COLOR Sensoren". Hier wurden die TCS3103 Color Sensoren der Firma ams verwendet. Diese können von dem einfallenden Licht den Rot-, Grün- und Blau-Gehalt liefern und diesen als Spannungswerte über den Output der jeweiligen Farbe ausgeben. Davon sind 30 kreisförmig im Winkel von 12° zueinander angeordnet. Die anderen 2 Stück liegen in der Mitte der Platine. |
 |
  |
Wiederholt brauchten wir die 74HCT4051 Multiplexer. Diesmal brauchten wir acht Stück davon. Das liegt daran dass wir nicht nur einen der drei Werte auslesen, sondern zwei nämlich den für Grün um die schwarze Linie zu erkennen und den Rot-Wert für die weiße Linie, da die Werte jeweils den größten Unterschied zwischen Linie und dem Grün des restlichen Feldes lieferten. Daher mussten insgesamt 64 Leitungen an den Teensy, was sich über acht 8-Port-Multiplexer sehr schön lösen lässt. Als Lichtquelle, deren Licht von dem Boden reflektiert wird und welches der Farbsensor aufnimmt, haben wir farblose LEDs benutzt, von denen Anteile beziehungsweise bestimmte Wellenlängen absorbiert und der Rest reflektiert wird und in den Sensor einfällt. In unmittelbarer Nähe zu jedem Sensor kam also eine LED der Bauform PLCC-2. Genauer war es eine solche als SMD-Bauteil (Surface Mounted Device). |
Die LEDs wurden wieder über einen MOSFET-Transitor, welcher vom Teensy geschaltet wurde, geschaltet.
Nach der Auswertung der Sensorwerte, sendete der Boden-Slave die Position der erkannten Linie relativ zum Roboter, den Abstand der Linie zur Mitte des Roboters und die Farbe der Linie, also Schwarz oder Weiß, über den I²C-Bus an den Master auf der Hauptplatine.