Wir benutzen eine Pixy CmuCam 5, in unserem Roboter, um das gegnerische und eigene Tor zu erkennen. Die Kamera benötigt ein
Gehäuse, damit sie während des Fahrens ihre Ausrichtung beibehalten kann. Dazu schützt das Gehäuse die Kamera vor
Zusammenstößen mit anderen Robotern.
Ebenfalls war die Idee, dass die Kamera möglichst hoch angebracht werden sollte, damit sie einen besseren Blickwinkel hat.
Das Gehäuse wurde mit der 3D-Designsoftware OpenScad erstellt, welche wir auch für unsere anderen Teile nutzten
und von einem 3D-Drucker gedruckt.
Das Gehäuse selber ging durch mehrere Stadien der Entwicklung. Unsere Verbesserungen und Gedankengänge werden im folgenden
erläutert.
Bild: OpenScad gerendertes Objekt Turm
Das Bild zeigt den Turm, in den die Kamera montiert wurde. Darunter ist ein Blueprint der Platine zu sehen, die für die
Maße eine Orientierungshilfe beim Modellieren war. Die Platine hat einen Durchmesser von 206 mm.
Die Idee dieses Turm war es, die Kamera durch das kleine Loch vorne blicken zu lassen. Befestigt wurde die Kamera, indem man sie
unten in die Platine steckte, welche ein Loch hatte, mit den genauen Maßen der Pixy Kamera.
Bild: Loch im Boden, in den die Pixy gesteckt wurde
Der Deckel wurde aufgelassen, weil es zu dem Zeitpunkt noch nicht klar war, ob man den Knopf der Pixy bedienen muss. Die Seiten des
Turms hatten auch Löcher, damit man Kabel zur Pixy gegebenfalls verlegen kann und damit die Kamera gut zugänglich ist.
Der Turm war mit 6 Gewindestangen mit der unteren Konstruktion verbunden.
Dieses erste Gehäuse war sehr klobig und passte nicht zum runden Design und Aufbau des Roboters. Aber nicht nur das Design
war ein Flop, sondern die Kamera stand nicht stabil im Gehäuse. Die Gewindestangen in der vorderen Wand lagen so nah aneinander , dass
die Linse der Kamera nicht durchpasste. Auch die Löcher an der Seite wurden in der Mitte von Gewindestangen geteilt, was ihren
ursprünglichen Zweck der Kabelverlegung zerstörte.
Des weiteren hatten wir zu der Zeit auch das Problem, dass wir beim Rückwärtsfahrten die hintere Wand unseres Tores berührten. Dies
war nicht regelkonform und wir wollten es dementsprechend mithilfe des Turms verhindern. Doch auch diese Aufgabe konnte der Turm
nicht meistern.
Bild: OpenScad gerenderter Turm2
Beim zweiten Turm lernten wir aus den Fehlern des ersten. Das Gerüst, das die Kamera halten sollte, wurde auf einen Sockel gestellt, der
mit 6 Schrauben mit der unteren Konstruktion verbunden wurde. Die Kamera wurde in den Sockel gesetzt, genau wie der erste Turm in
die Platine. Dazu wurde die Kamera aber auch mit zwei Gewindestangen an dem Gerüst gesichert. Der hintere Kasten war als Kabelschacht
zum unteren Teil des Roboters gedacht. Des weiteren konnte in den Kabelschacht noch optional ein Ultraschallsensor angebracht werden,
der nach hinten ausgerichtet war. Das Besondere war, dass die oberen Teile vom Sockel abnehmbar waren und mithilfe eines Stecksystems
wieder zurückgesteckt werden konnten.
Das erste Problem mit dem zweiten Turm war, dass er die falschen Maße hatte und die Kamera nicht in das Gerüst passte. Dazu war
das Stecksystem eine gute Idee gewesen, doch der Turm verlor an Stabilität. Des weiteren ergab sich mit der Zeit, dass die Kamera in
einem bestimmten Winkel geneigt werden musste und das mit diesem Konzept des Turms nur schwer umsetzbar war.
Ein weiter bestehendes Problem war, dass der Roboter immer noch beim Rückwärtsfahren die hintere Wand berührte.
Bild: zweiter Turm mit überarbeiteten Maßen + Grau: Sockel, Gelb: Gerüst
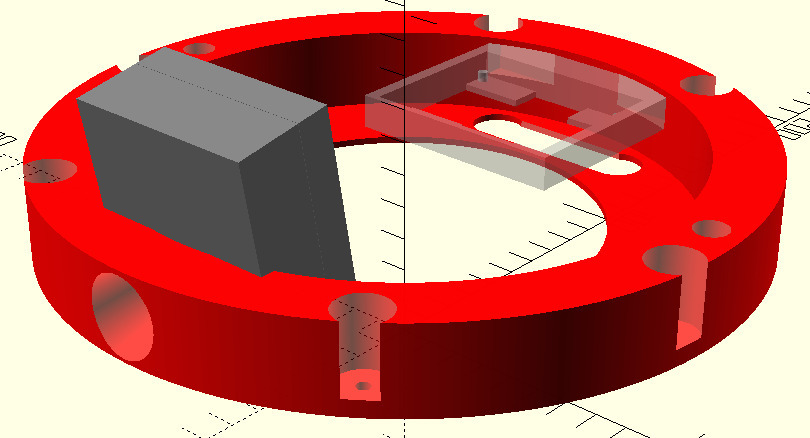
Bild: OpenScad gerenderter Ring
Nun begannen wir mit einer vollkommen anderen Idee zu arbeiten: Anstatt einen Turm in die Mitte des Roboters zu stellen, entschieden
wir uns dafür, den Roboter stockwerkweise aufzubauen. Dies brachte dem Roboter zusätzliche Stabilität und verhinderte, dass er
rückwärts ins Tor hineinfuhr. Mit dem Ring sind alle Probleme der vorigen Modelle gelöst worden. Die Kamera ist in einem stabilen
Gehäuse aufbewahrt, welches perfekt auf die Maße abgestimmt wurde.
Die Kamera ist etwas gekippt, damit die Kamera nicht über den Spielfeldrand hinaus schaut. Mit der unteren Konstruktion ist er
mithilfe von 6 Gewindestangen verbunden.
Das Kameragehäuse ist abnehmbar und kann bei heftigen Zusammenstößen abbrechen oder kaputtgehen. Deshalb musste es oft mit
Heißkleber befestigt werden.
Leon Gessner