Die Lötarbeit am Roboter
Vor dem Löten wird zuerst die Temperatur bei der Lötstation eingestellt. Mit der Lötspitze werden beim Löten die zu verlötenden Teile berührt und an diese Stelle wird dann Lötzinn gegeben. Sobald das Lötzinn verlaufen ist, den Lötkolben dabei immer in Kontakt lassen, wird als erstes der Lötzinn und dann der Lötkolben entfernt. Fehler beim Löten machen sich oft erst später bemerkbar. Ein oft gemachter Fehler sind kalte Lötstellen. Bei einer kalten Lötstelle besteht keine Verbindung zwischen Lot und Fügepartner.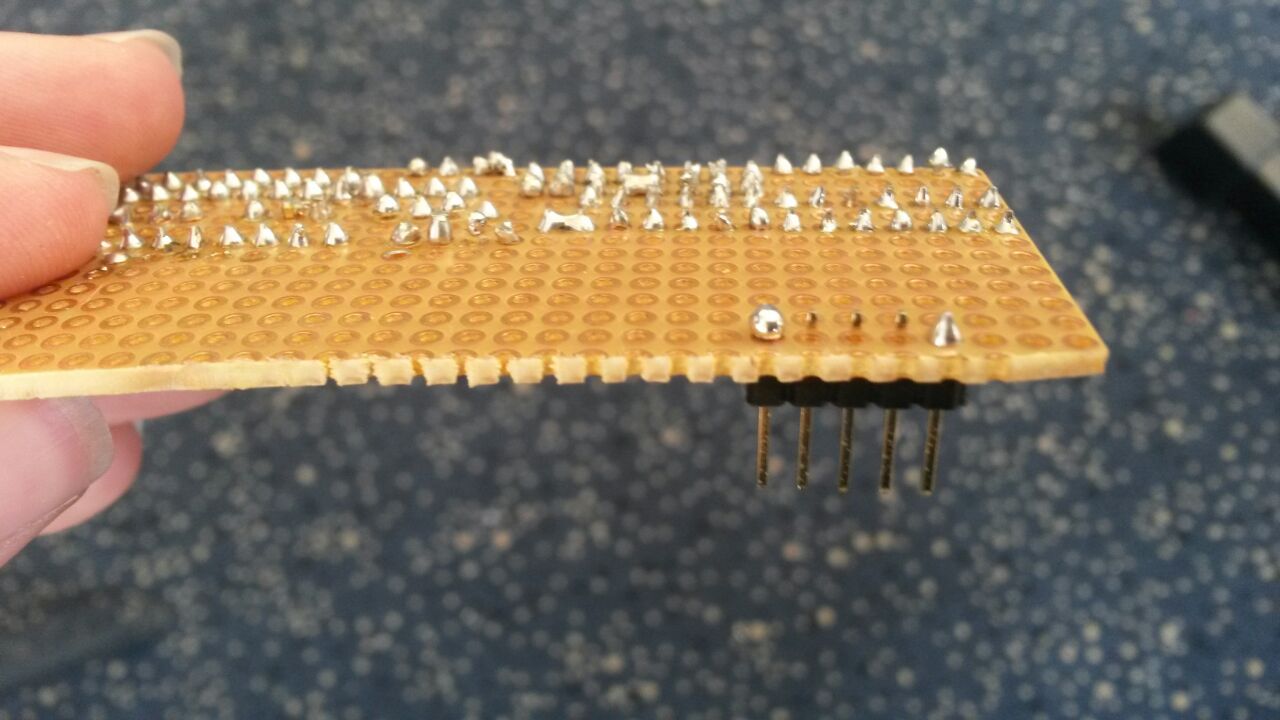
(eine mögliche kalte Lötstelle -> links zu sehen)
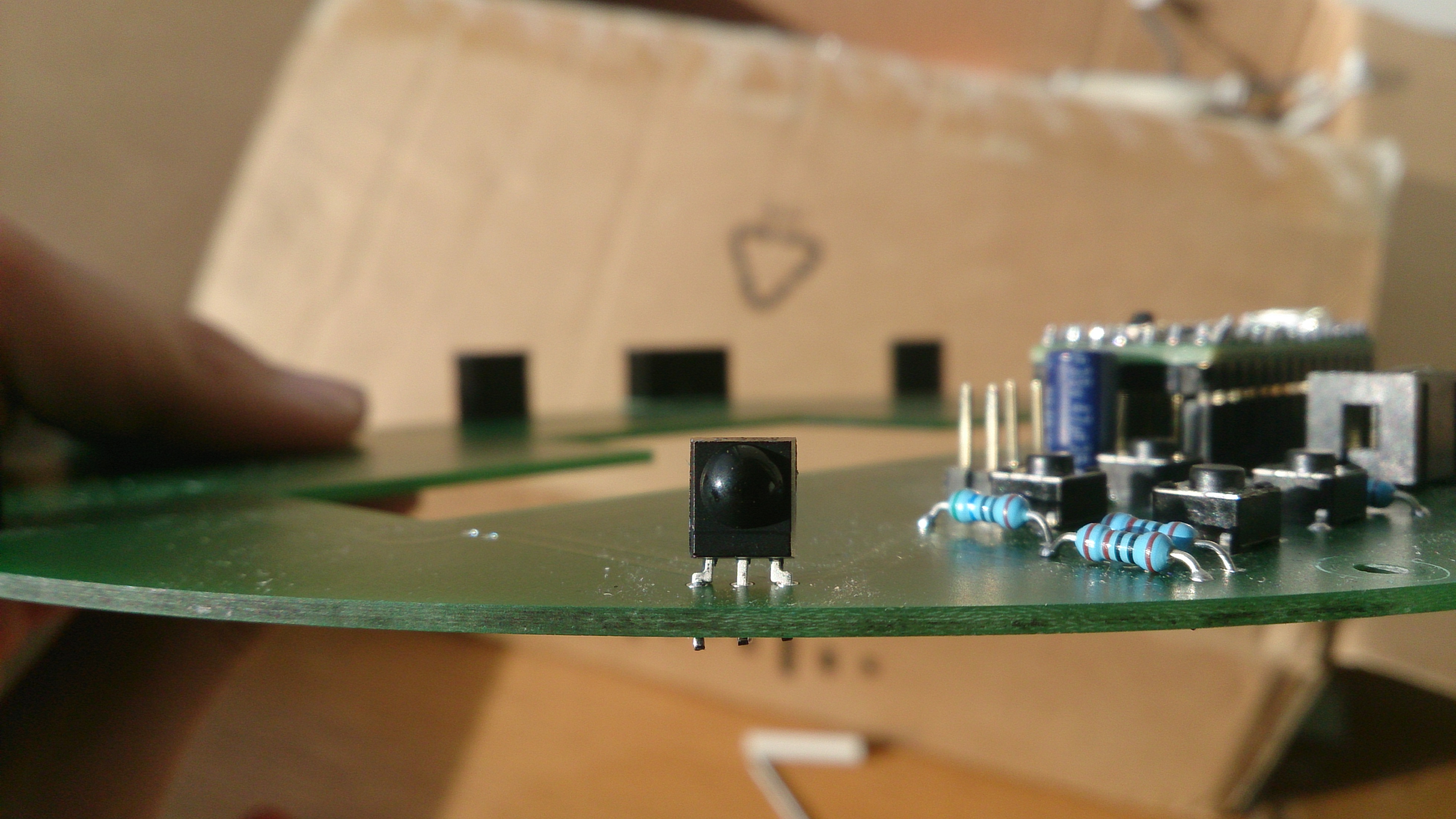
Auf die, mit Eagle designte, obere Platine, werden die Steckerleisten, die verschiedenen Widerstände, 2 LEDs, 10 Taster und 12 Infrarot Sensoren festgelötet.
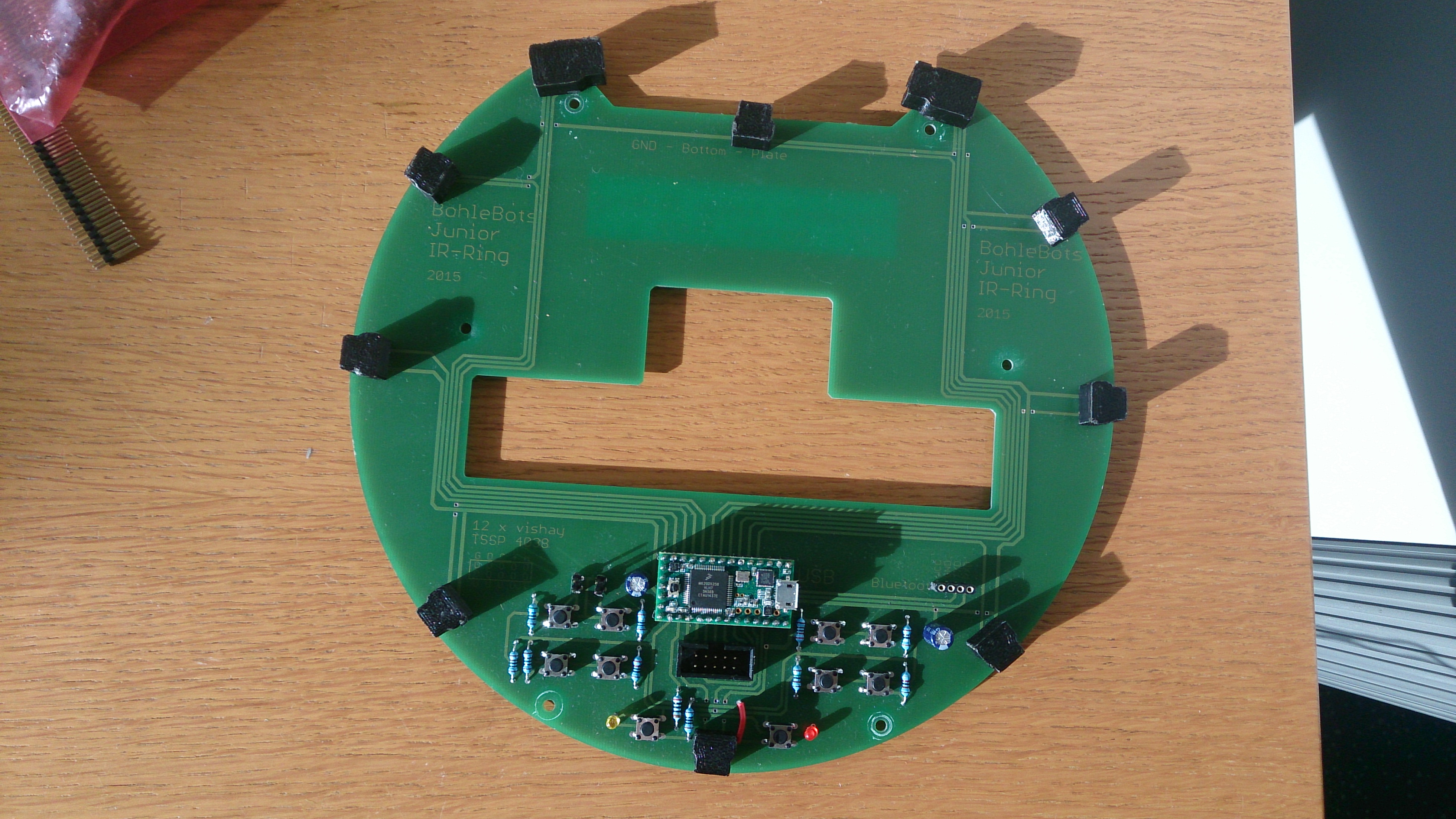
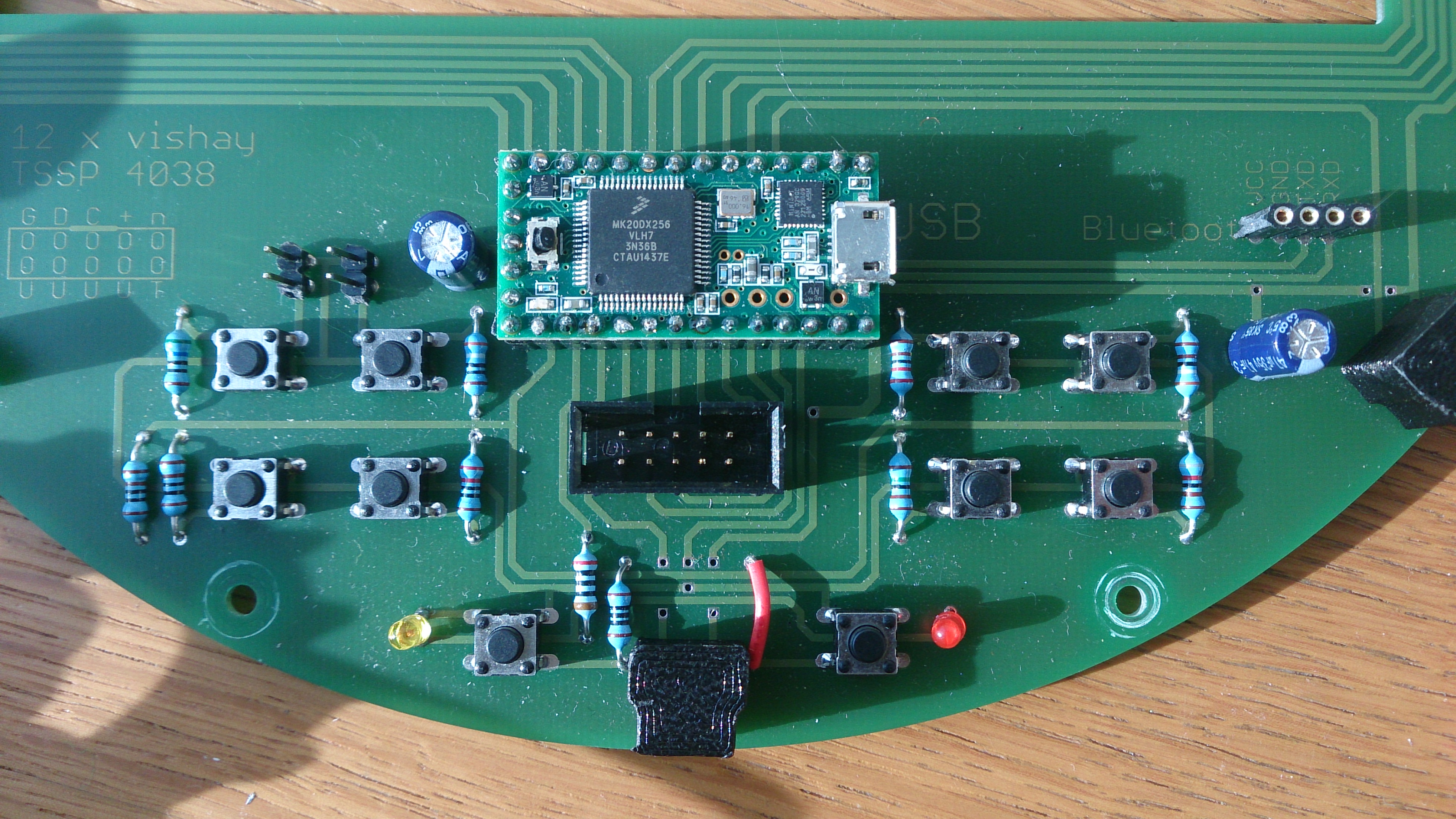
Über die 12 Infrarot Sensoren werden von uns mit 3D Druck designten Hütchen gesteckt.
An den Teensy für die obere und untere Platine werden Sockel festgelötet.
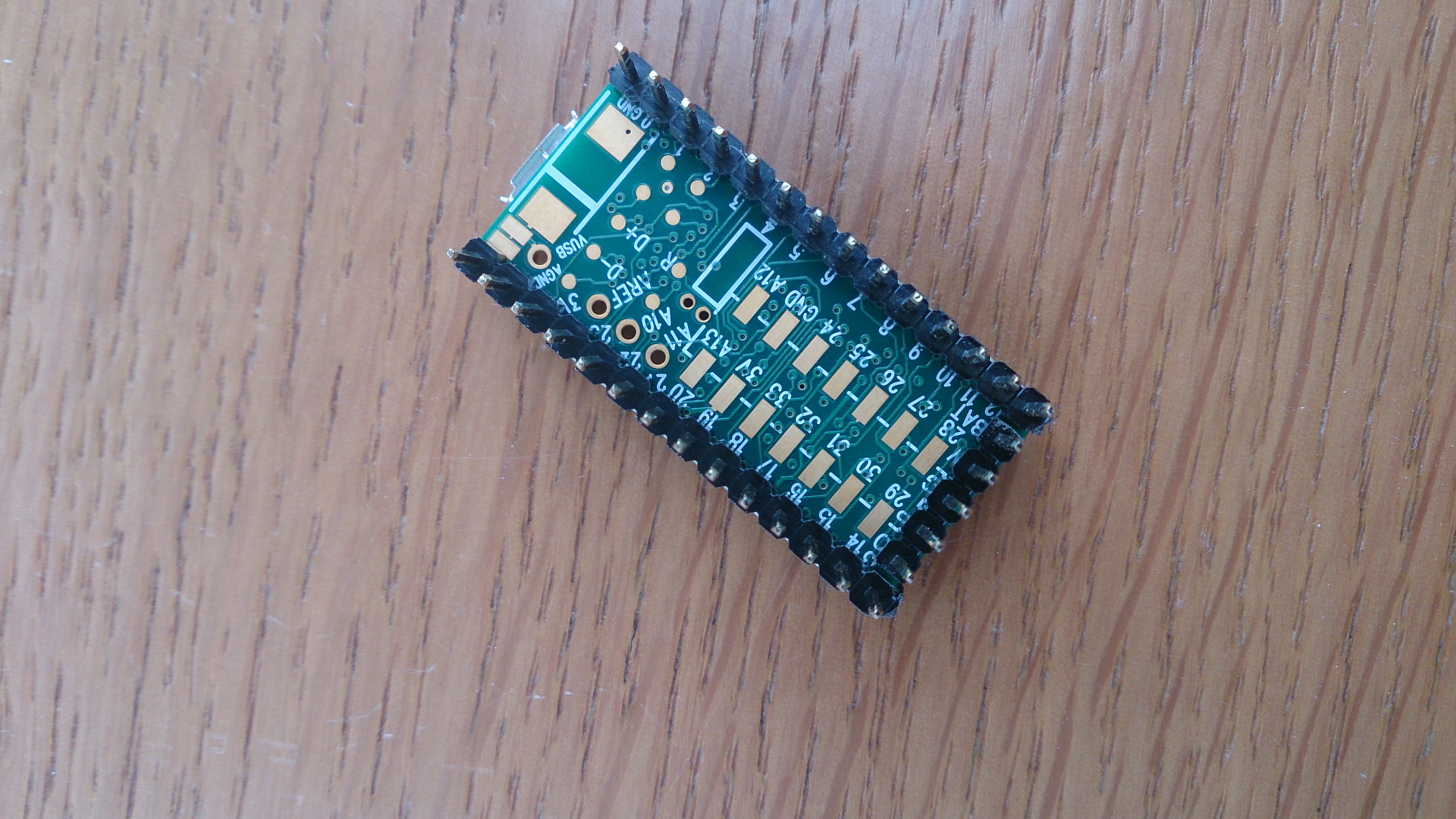
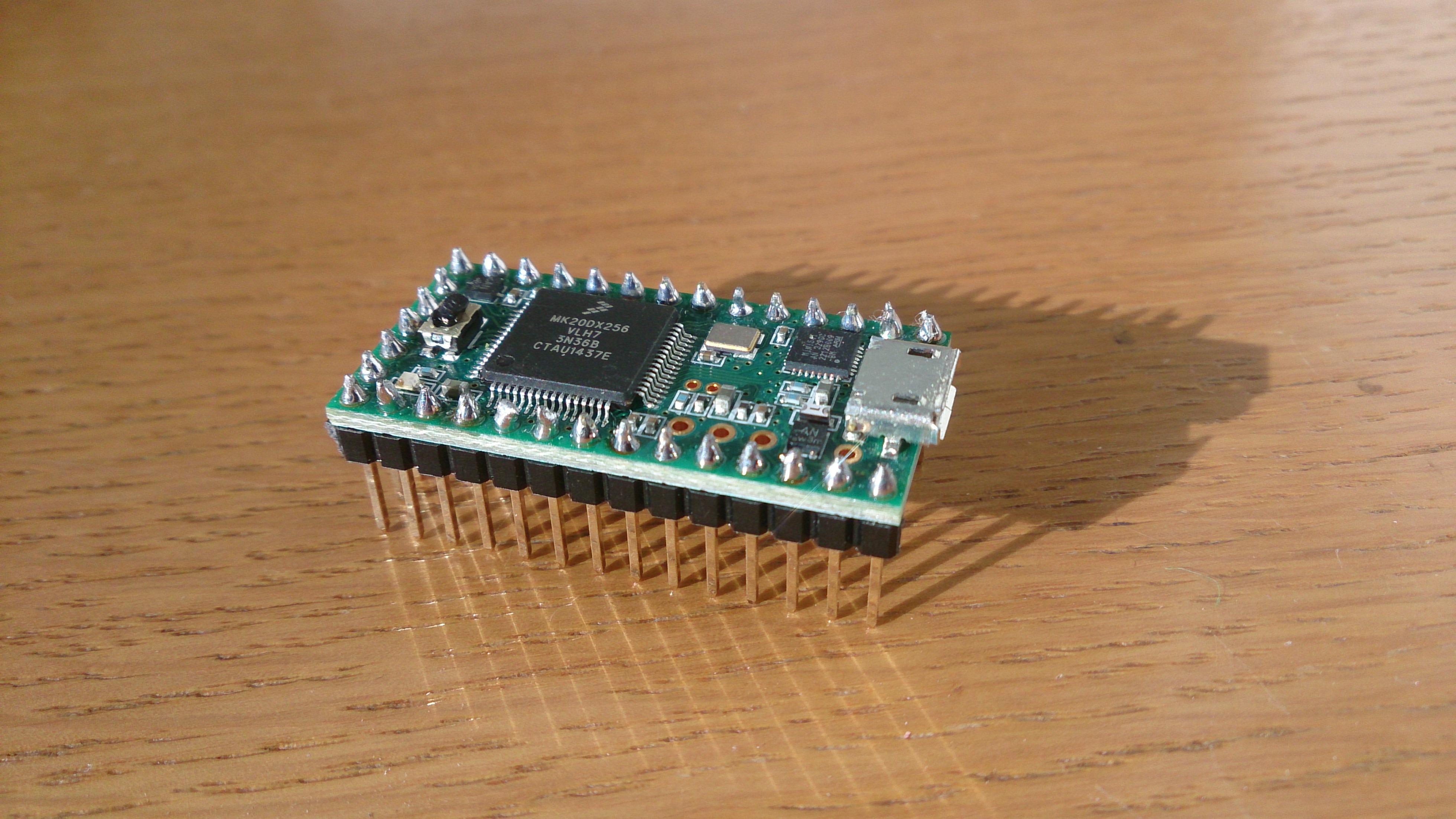
Die Teensys werden auf der Platine mithilfe der Steckerleisten festgesteckt. Die Steckerleisten und Sockel werden am besten von außen nach innen an die Platine und Teensys gelötet.
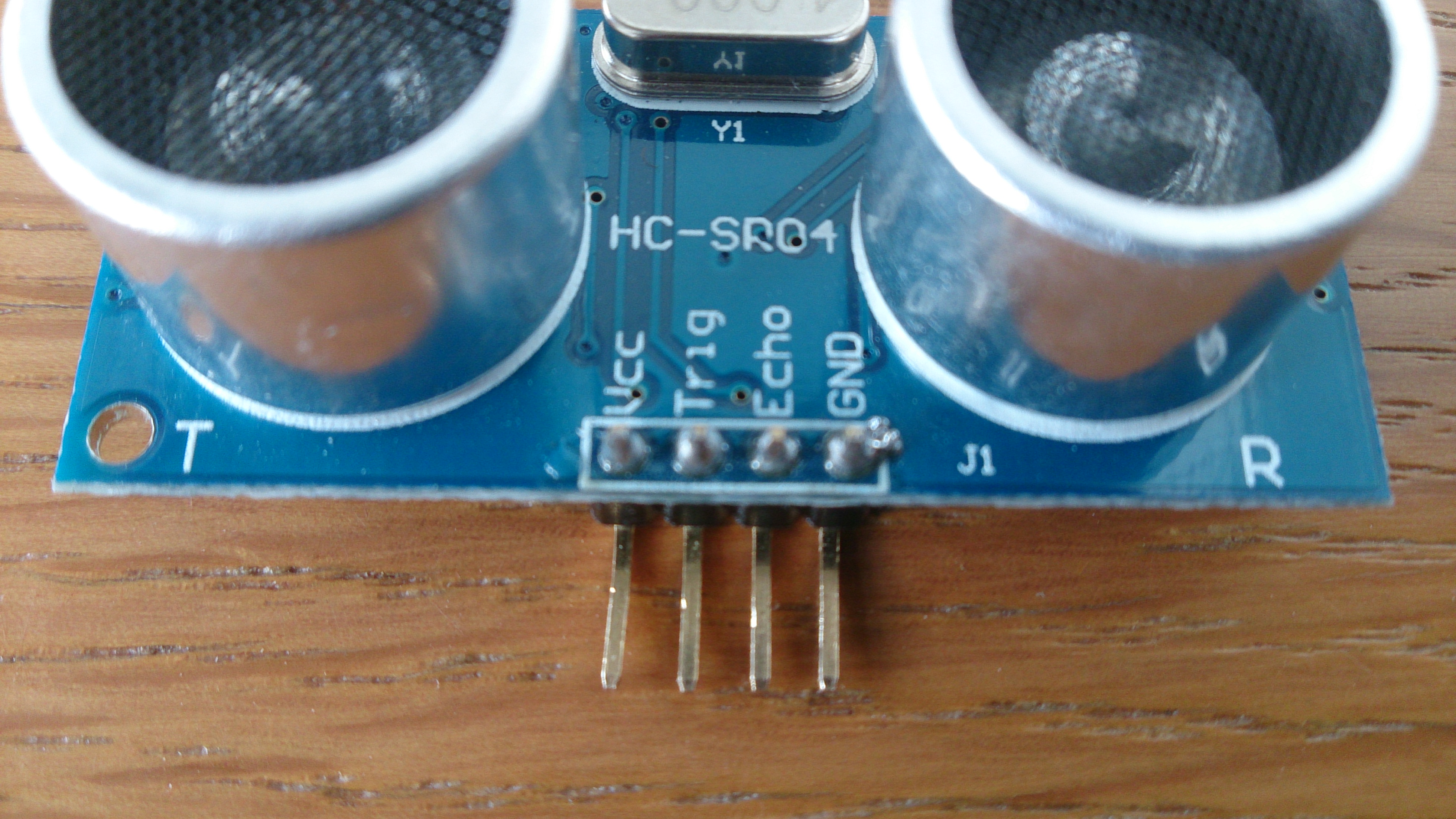
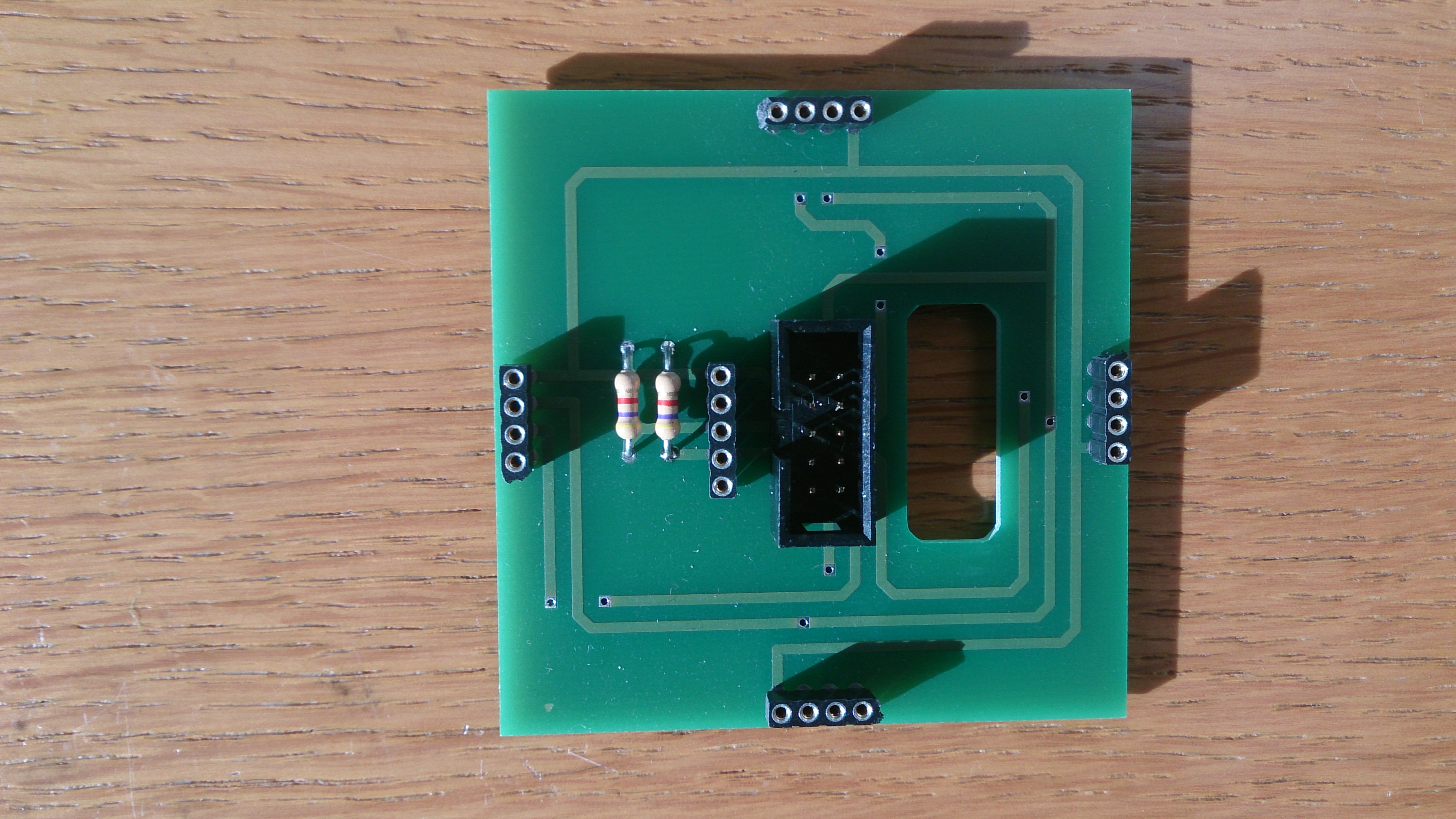
Für unseren Turm haben wir eine viereckige Platine designt. Auf ihr werden die Steckerleisten für die Ultraschall-Sensoren, für den Kompass und 2 Widerstände und den Stecker für das I2C Bus Kabel angelötet.
An die vier Ultraschall-Sensoren werden Sockel festgelötet und dann auf die Turm-Platine gesteckt.