Hardware – Untere Platine
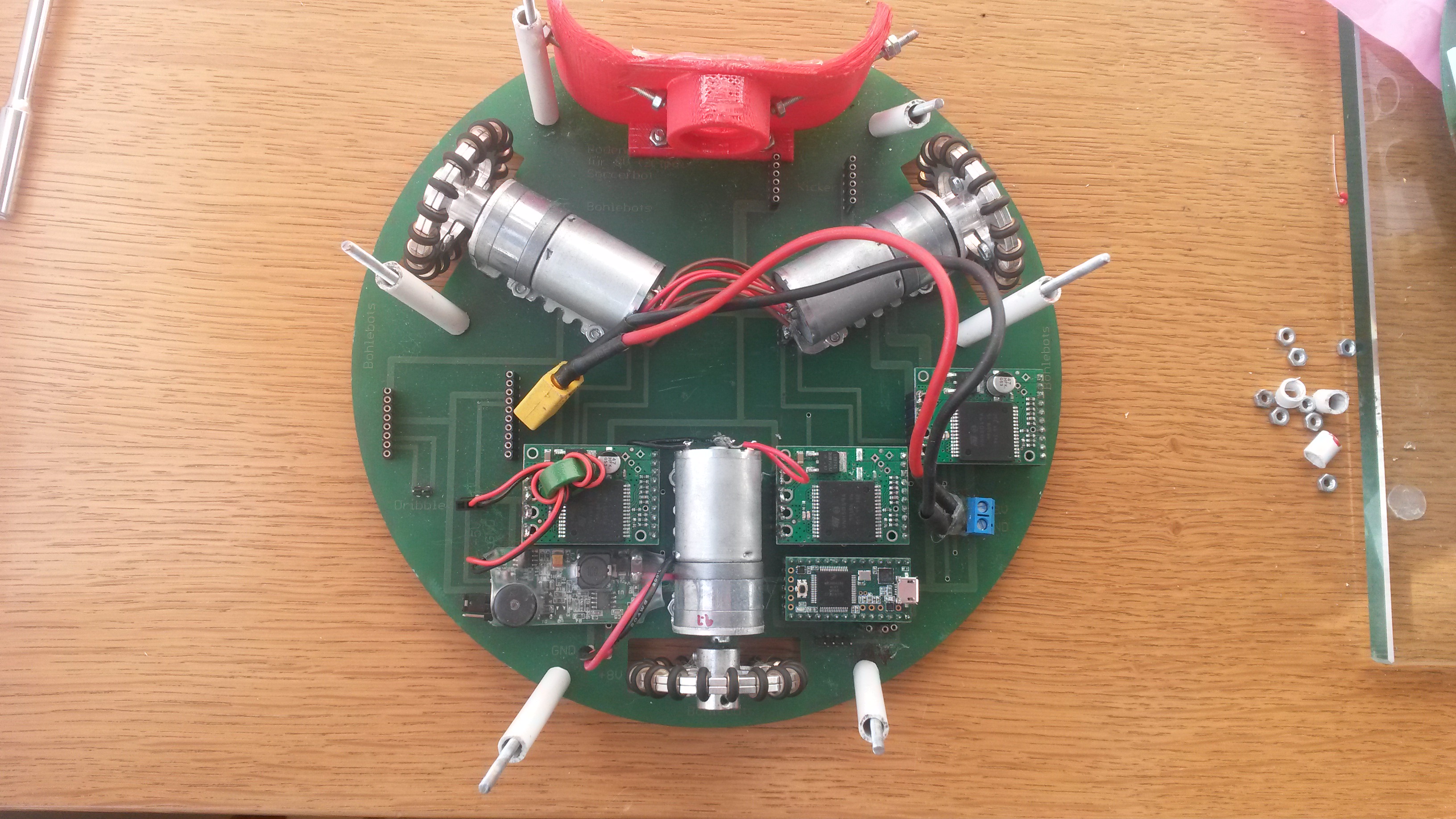
Unser Roboter besteht im wesentlichen aus zwei Platinen. Im folgenden werde ich den Aufbau der unteren Platine erläutern.
Unsere Platinen wurden mithilfe von Eagle designt und gedruckt von Wendling Electronics Haan. Die genutzten Bauteile sind:
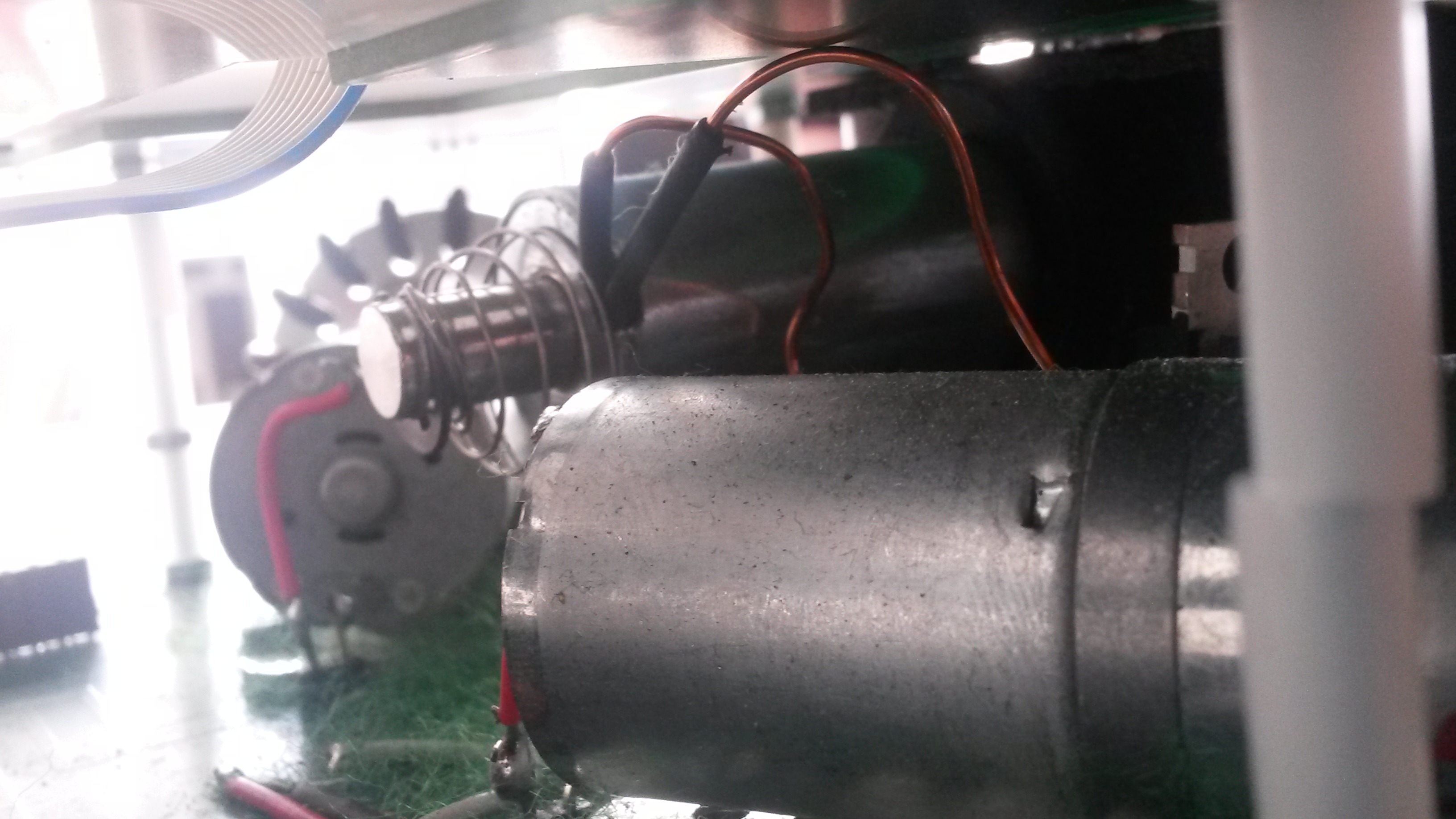
Motor
Bei unseren Motoren handelt es sich um den Typ #1571 von Pololu. Wir haben für den Bau unseres Roboters 3 dieser Motoren verwendet und sie gleichmäßig verteilt auf unseren runden Platinen befestigt.Durch die Anbringung im 120° Winkel können wir in möglichst viele Richtungen fahren.
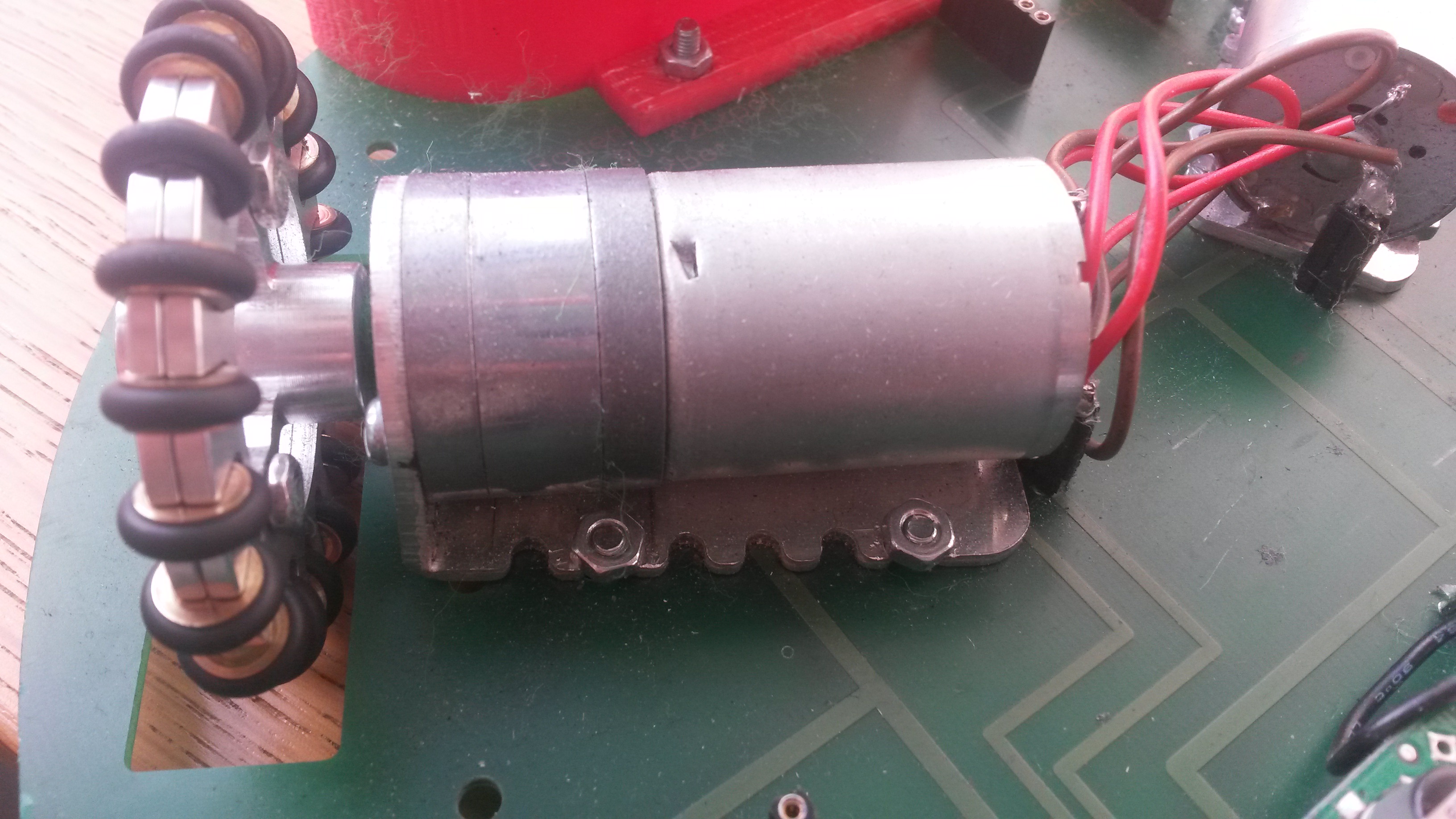
Räder
Die Räder sind eine Spezialanfertigung von Maschinenbau Jörg Heß. Es handelt sich dabei um Omniwheels. Diese besitzen kleine Rädchen senkrecht zur eigentlichen Fahrtrichtung um das Fahren in alle Richtungen zu ermöglichen.
Motortreiber
Bei unseren Motortreibern handelt es sich um das Modell vnh5019 von Pololu. Dieser wird benötigt um die Motoren anzusteuern.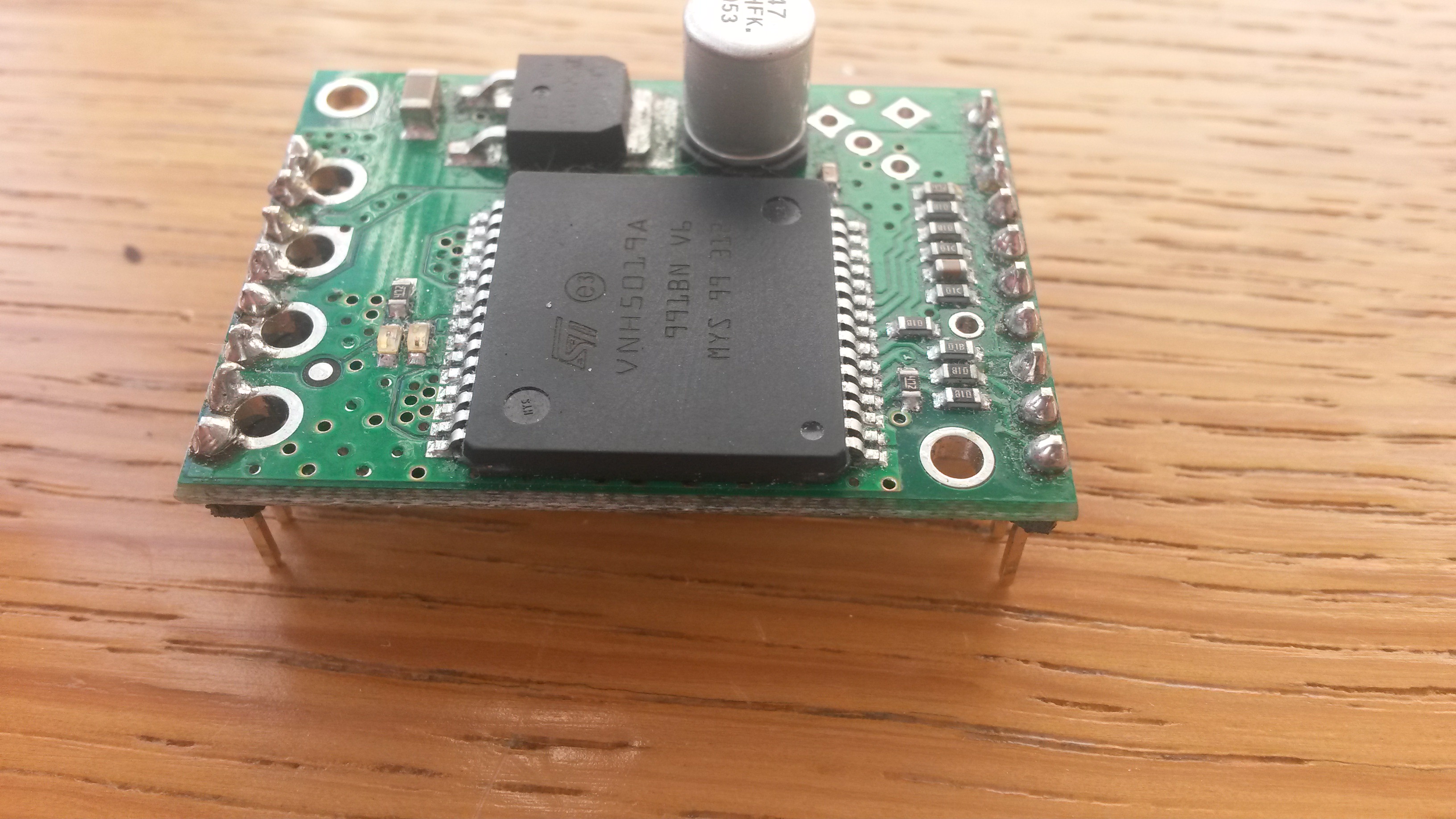
Motorhalterung
Die Motorhalterungen (von Pololu) dienen dazu die Motoren auf der Platine zu befestigen.Spannungsregler
Der Spannungsregler (Turnigy Ubec Buzzer 3A) gleicht die Spannung aus und gibt ein Signal wenn sie zu hoch oder zu gering ist.Kicker-Wand
Die vordere Wand wurde mit einem 3D Drucker für unseren Roboter angefertigt. Sie dient dazu den Ball führen zu können und schützt die dahinter liegenden Bauteile. Zudem besitzt sie eine Öffnung um einen Kicker einzubauen.
Kicker
Den Kicker haben wir selber hergestellt. Er dient als Schussvorrichtung um den Ball nach vorne zu bringen oder ein Tor zu schießen.