Hardware – Ring-Platine
Unser Roboter besteht aus zwei Platinen, auf welche wir Bauteile jeglicher Art gelötet, geschraubt und geklebt haben. Zur Kommunikation der beiden Platinen bzw. Prozessoren verwenden wir einen I2C Bus. Die Platinen wurden von uns mit Eagle designt und von Wendling Elektronik GmbH gedruckt. Im folgenden werde ich den Aufbau der oberen Platine erklären.
Prozessor
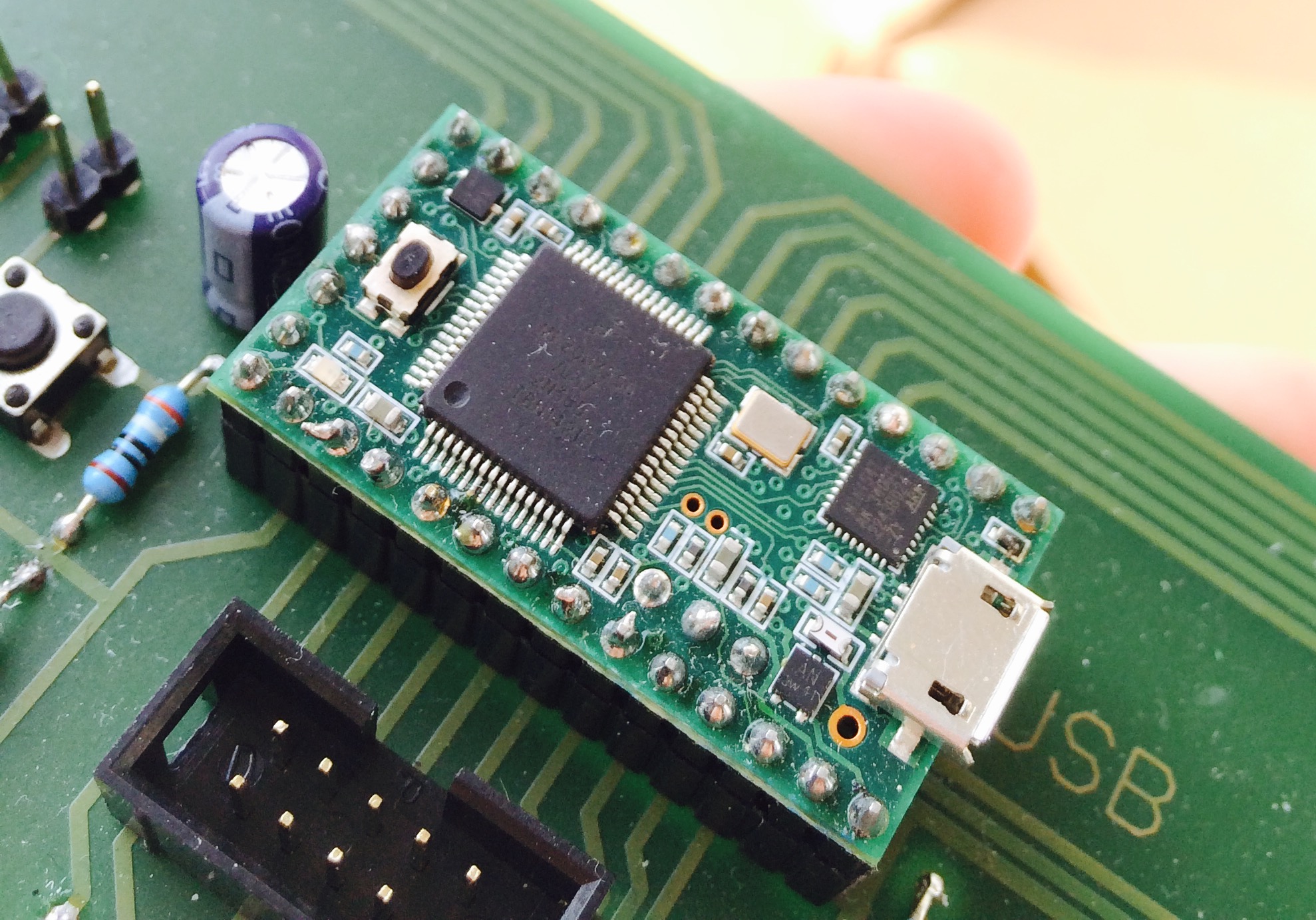
Als Prozessor benutzen wir einen Teensy 3.1. Mit dem Prozessor werden die Bauteile der Platine gesteuert und ausgelesen. Dieser ist für Arduino, C und C++ Projekte geeigent. Der Teensy basiert auf einem 32 bit ARM Chip.
Infrarot Sensoren
Wir benutzen Infrarot Sensoren vom Typ tssp4038 der Firma Vishay. Die Sensoren dienen zur Erkennung des Balls, welcher Infrarot-Strahlung ausehenden. Auf der Platine haben wir 10 Infrarot Sensoren, welche in einem 36° Winkel angeordnet sind eingelötet. Um zu erkennen wenn der Ball in der Öffnung des Roboters und somit zu Kicken bereit ist, haben wir bei 36° und bei 324° jeweils noch einen nach innen guckenden Sensor angebracht.
Hütchen
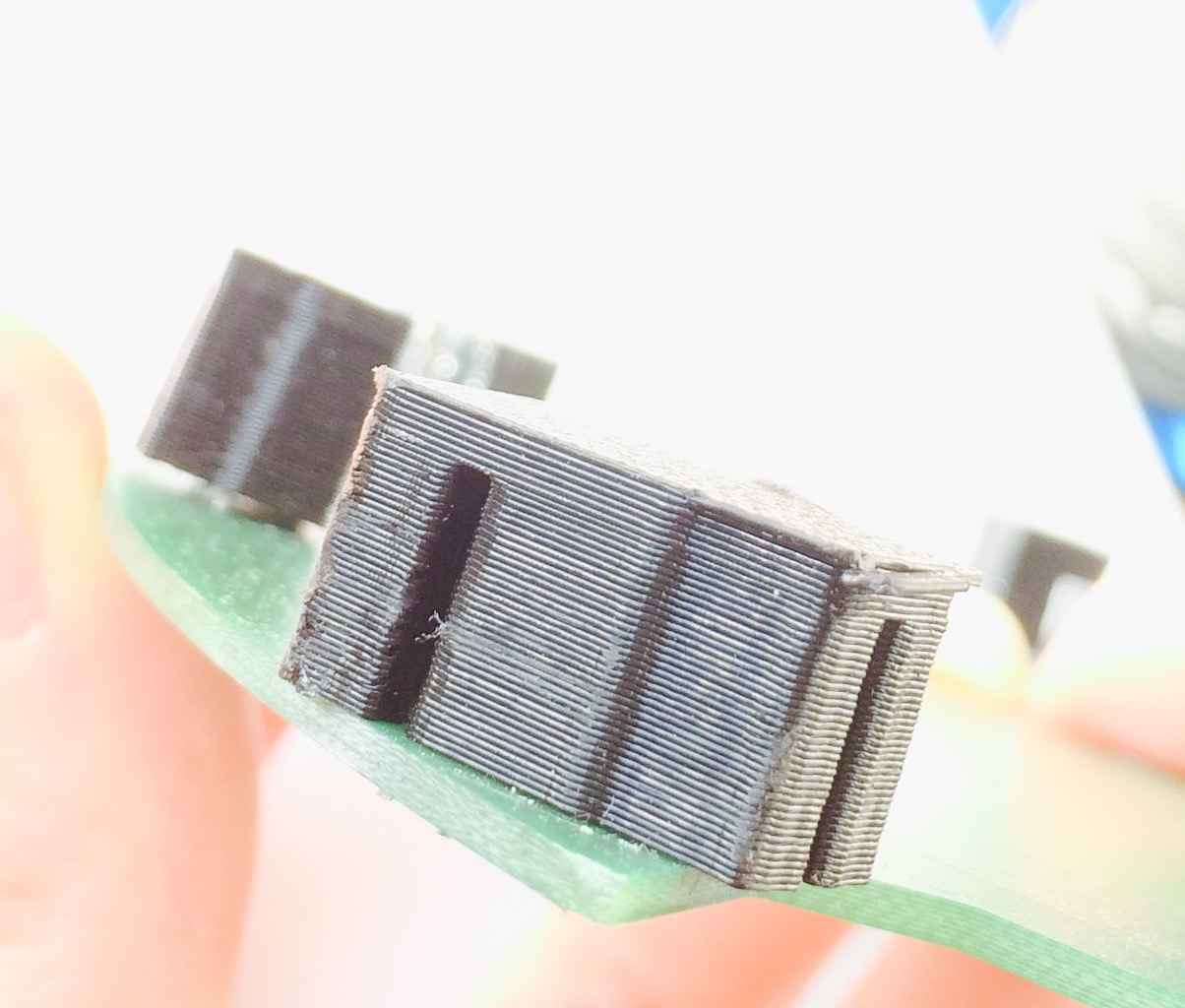
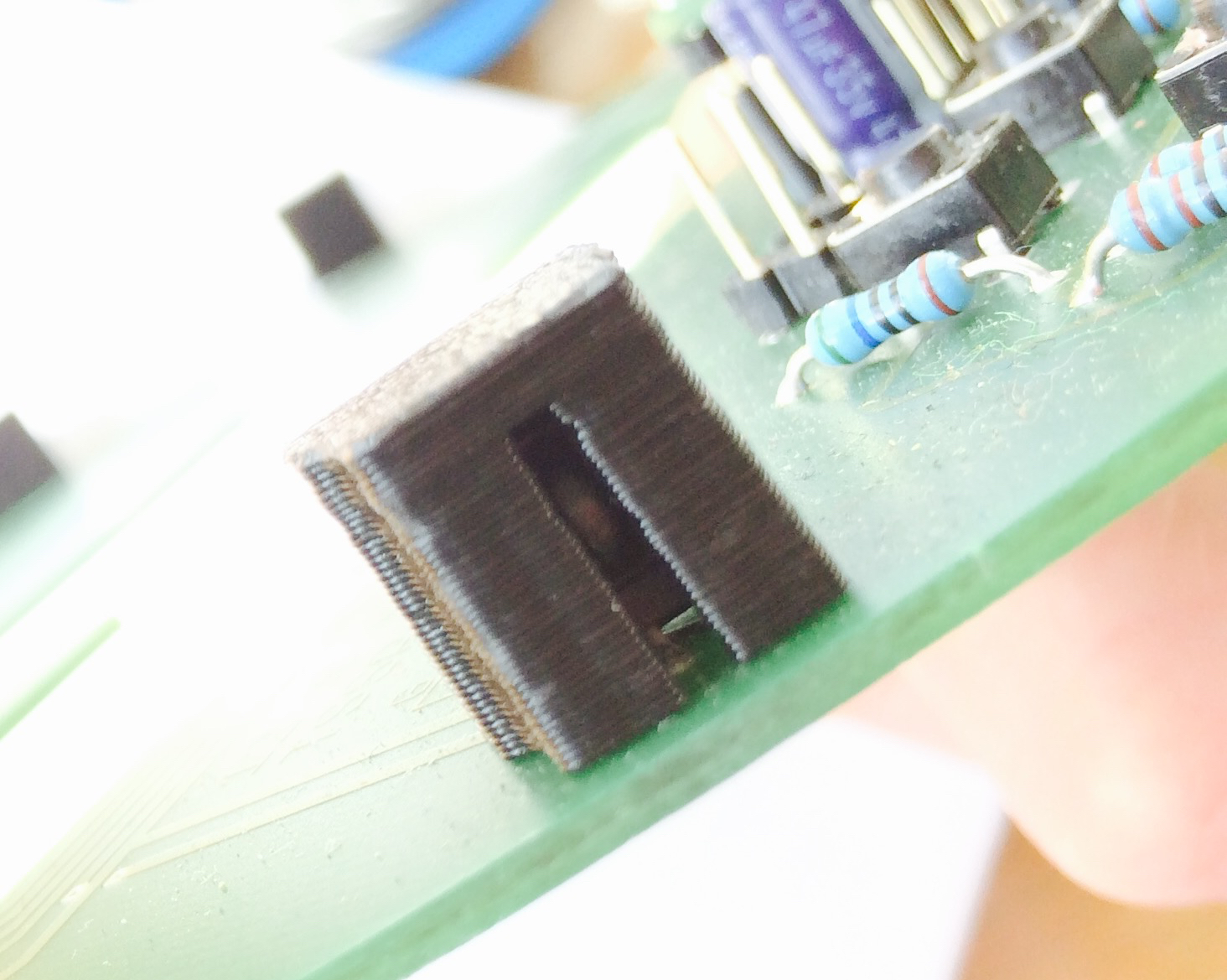
Für die Infrarot Sensoren haben wir Hütchen mit einem 3D-Drucker gedruckt. Die Hütchen dienten der Einschränkung des Sichtfelds der Sensoren. Durch die Einschränkung konnten wir den Ball genauer in seiner Position bestimmen.
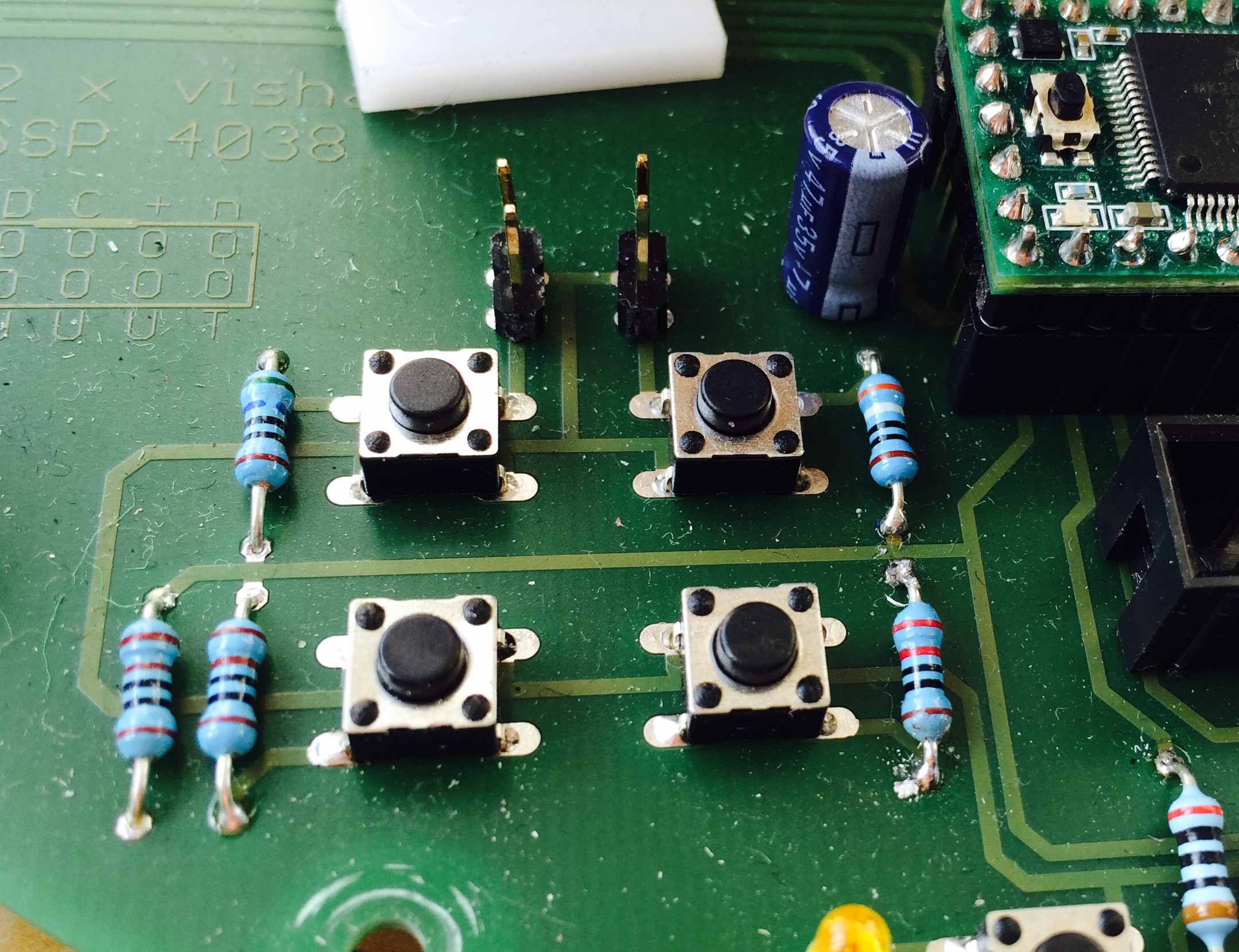
Knöpfe und Widerstände
Wir haben 10 Knöpfe für die Bedingung des Roboters auf der Platine angebracht. Damit das Drücken der Knöpfe durch den Prozessor unterschieden werden kann, muss jedem Knopf ein Widerstand zugeordnet werden. Hierbei ist aber wichtig das kein Widerstand mehrmals vorkommt, denn sonst können die Knöpfe mit dem gleichen Widerstand nicht unterschieden werden.
LED´s
Auf der Platine haben wir zwei LED´s angebracht um zu überprüfen ob es einen Fehler beim Ablaufen des Programms oder der Verbindung gibt.
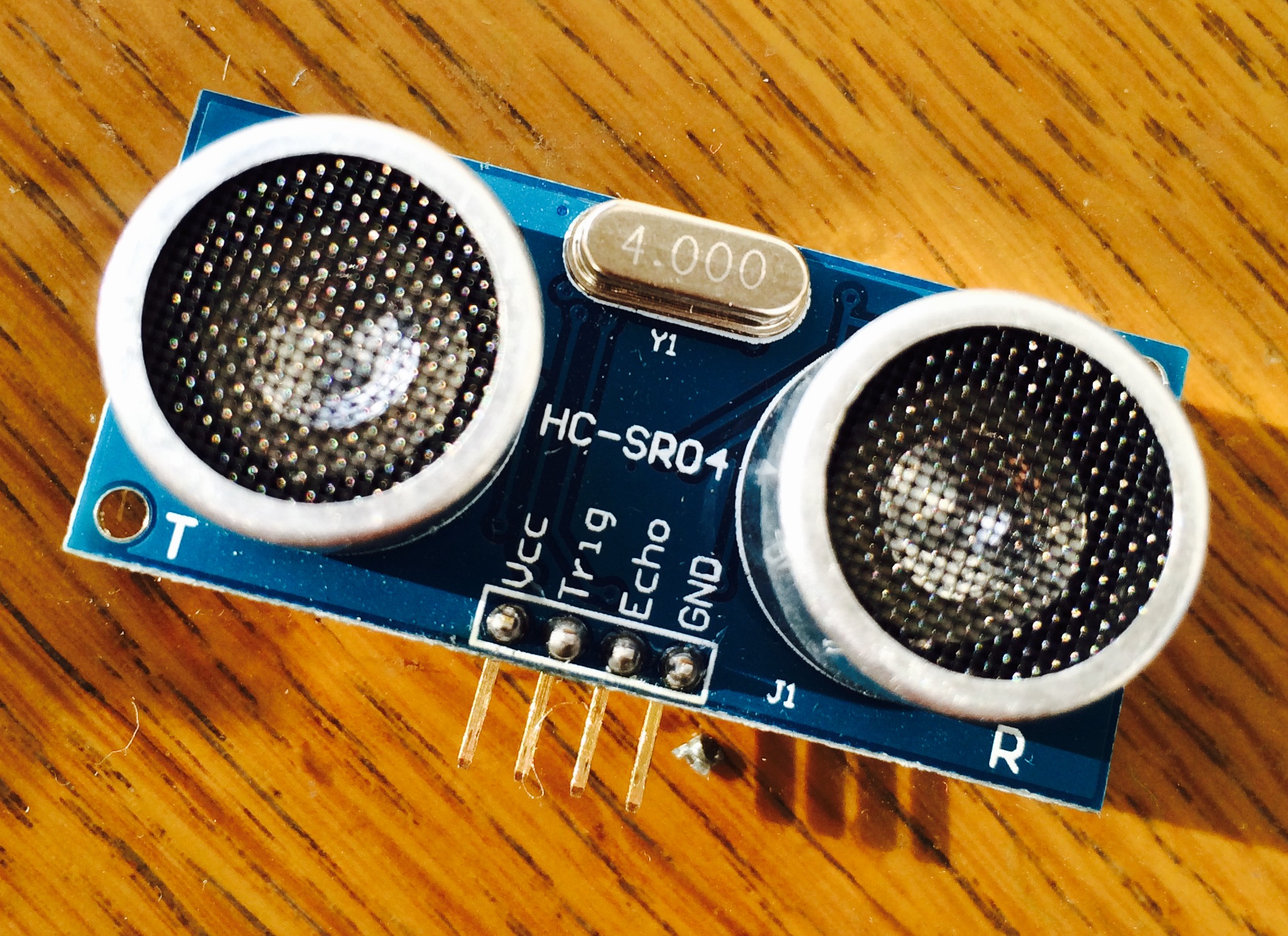
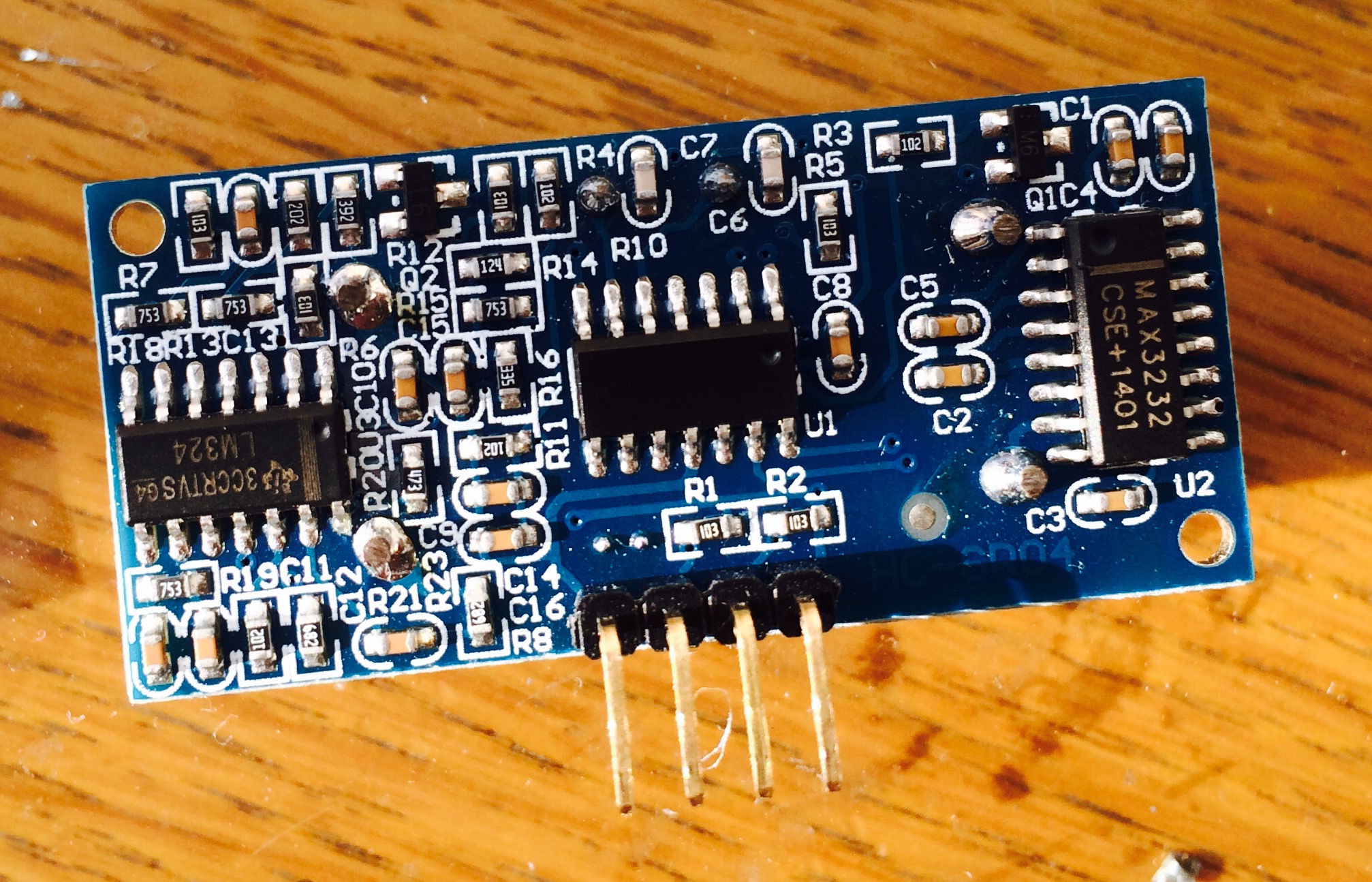
Ultraschall Sensoren
Als Ultraschall Sensoren benutzen wir Sensoren vom Typ HC-SR04. Wir haben vier Sensoren, in jede Himmelrichtung einen. Mit den Ultraschall Sensoren messen wir die Abstände zum Spielfeldrand.
Kompass Sensor
Um die Positon des Roboters auf dem Feld zu bestimmen benutzen wir einen Kompass Sensor des Typus HMC 5883L. Zu Anfang des Spiels richten wir den Roboter so aus, dass der Kompass 0° sagt, wenn der vordere Sensor zum eigenen Tor zeigt.
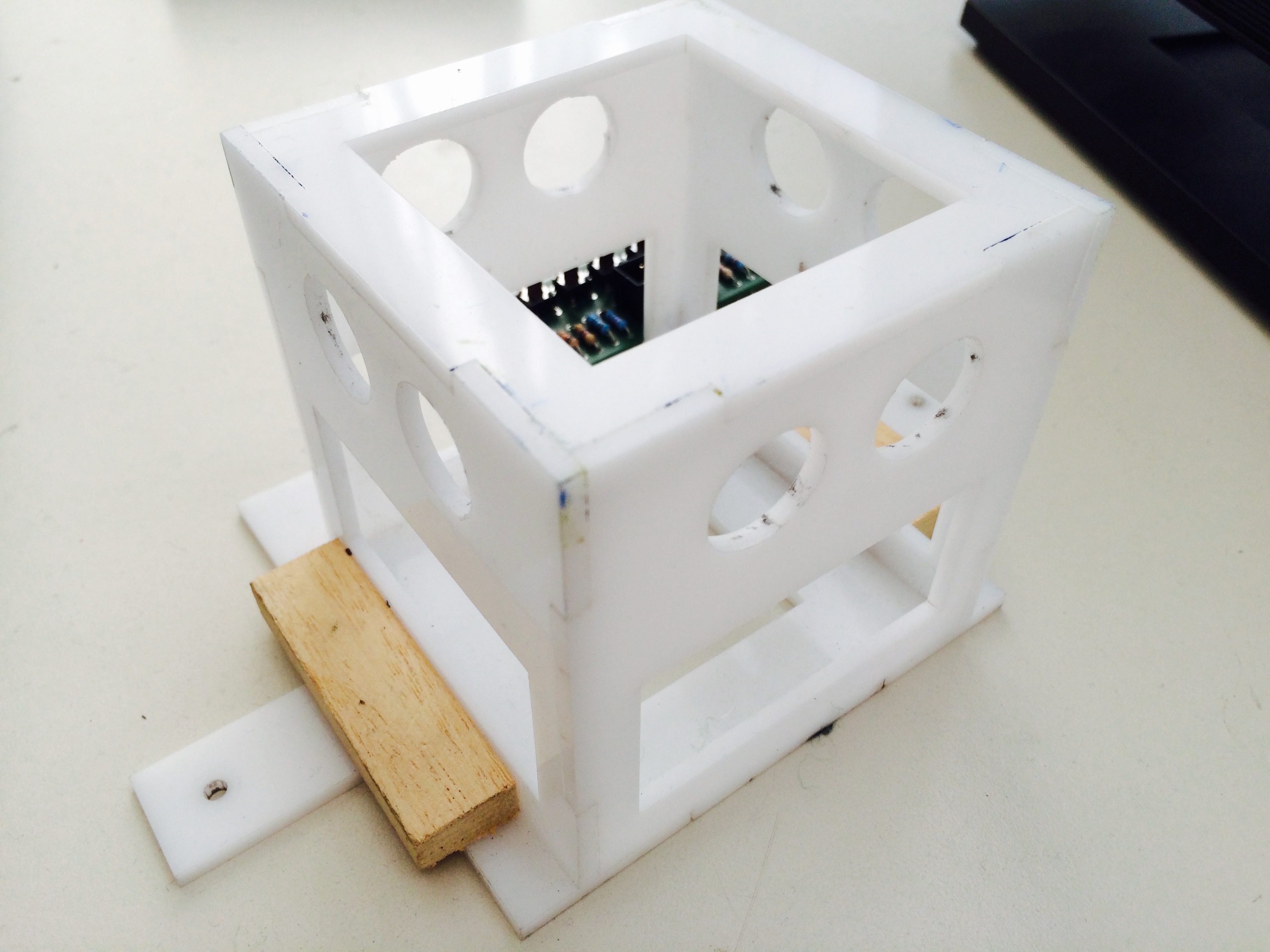
Turm
Den Turm haben wir mit einer Fräse aus Plastik gefräst und dann die Einzelteile zusammen gebaut und verklebt. An dem Turm haben wir die vier Ultraschall Sensoren und den Kompass Sensor befestigt.